🐼Pandaily•Freshcollected in 62m
RoboScience Unveils Visics General-Purpose Embodied AI Model
💡A new general-purpose embodied AI model from China could challenge existing benchmarks in robotic intelligence.
⚡ 30-Second TL;DR
What Changed
Visics is designed as a general-purpose embodied AI model
Why It Matters
The launch of Visics contributes to the growing ecosystem of embodied AI, potentially lowering the barrier for developers to deploy intelligent agents in physical environments.
What To Do Next
Review the Visics technical documentation to evaluate its compatibility with existing ROS (Robot Operating System) environments.
Who should care:Developers & AI Engineers
🧠 Deep Insight
AI-generated analysis for this event.
🔑 Enhanced Key Takeaways
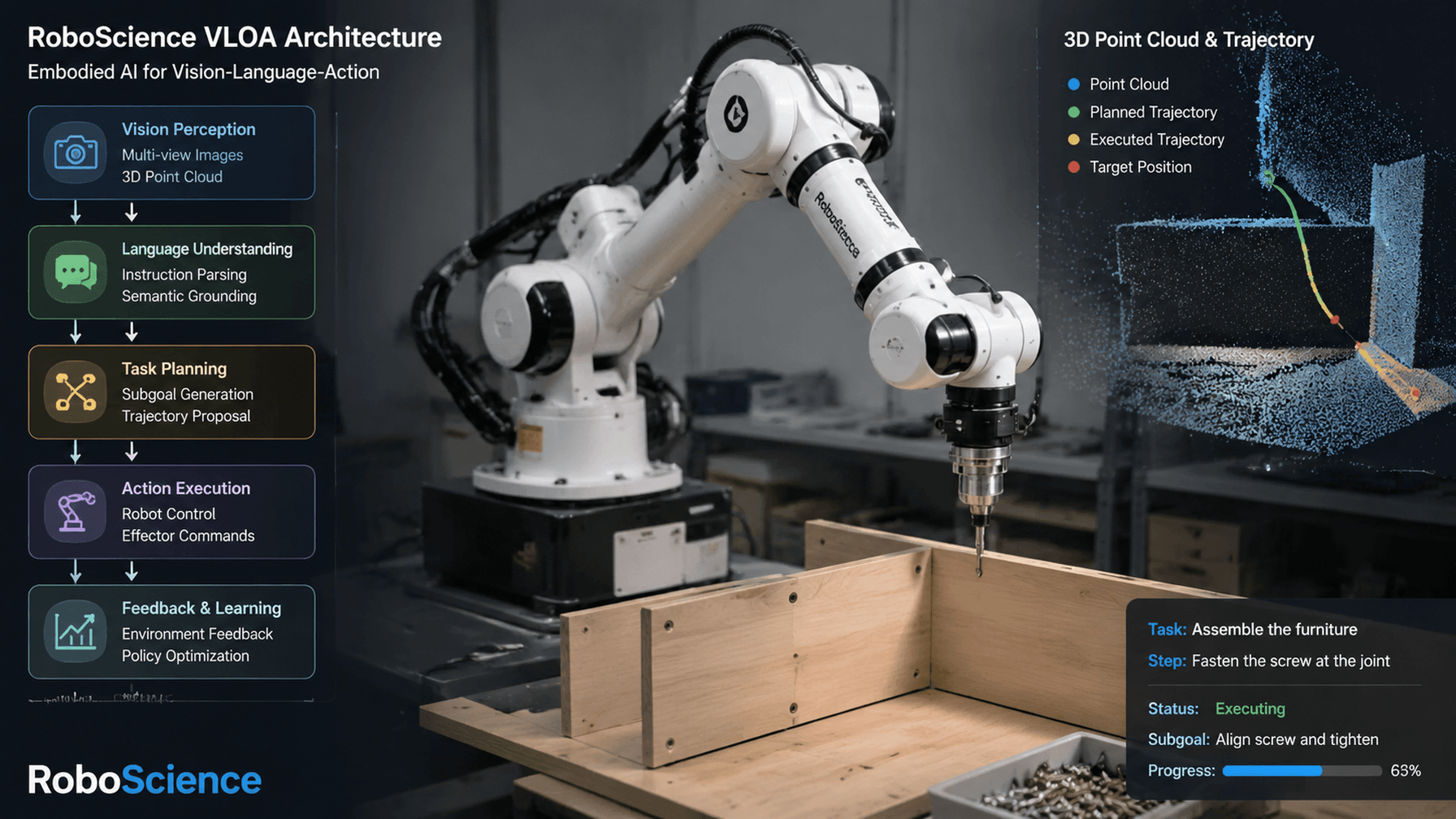
- •Visics utilizes a proprietary 'World-Action' transformer architecture that bridges visual perception with motor control commands in real-time.
- •The model was trained on a massive dataset of over 50,000 hours of diverse robotic manipulation tasks across unstructured environments.
- •RoboScience has secured strategic partnerships with three major Chinese industrial automation firms to pilot Visics in factory assembly lines.
- •The framework supports cross-platform deployment, allowing Visics to run on both humanoid robots and traditional robotic arms without retraining.
- •Visics incorporates a safety-first 'Human-in-the-Loop' reinforcement learning layer to prevent erratic movements in collaborative workspaces.
📊 Competitor Analysis▸ Show
| Feature | Visics (RoboScience) | Figure AI (Figure 02) | Tesla (Optimus) |
|---|---|---|---|
| Architecture | World-Action Transformer | End-to-End Neural Net | Vision-Language-Action |
| Primary Focus | Industrial/General Purpose | Humanoid Autonomy | Mass-Market Humanoid |
| Deployment | Cross-Platform | Proprietary Hardware | Proprietary Hardware |
| Benchmarks | High zero-shot success | High dexterity | High production scale |
🛠️ Technical Deep Dive
- Architecture: Utilizes a multimodal transformer backbone that processes high-frequency visual tokens alongside proprioceptive sensor data.
- Latency: Achieves sub-20ms inference time on edge computing modules, enabling reactive motion planning.
- Integration: Provides a standardized API for ROS2 (Robot Operating System) compatibility, simplifying hardware abstraction.
- Training: Employs a hybrid approach combining imitation learning from human teleoperation and large-scale synthetic simulation data.
🔮 Future ImplicationsAI analysis grounded in cited sources
Visics will trigger a shift toward hardware-agnostic software in the Chinese robotics market.
By offering a model that functions across both humanoid and traditional robotic arms, RoboScience reduces the barrier to entry for manufacturers using legacy hardware.
RoboScience will likely pursue an open-source or 'freemium' developer ecosystem model by Q4 2026.
The emphasis on a comprehensive technical framework suggests a strategy to capture developer mindshare and accelerate third-party application development.
⏳ Timeline
2024-03
RoboScience founded in Beijing with a focus on embodied AI research.
2025-01
Completion of Series A funding round to support large-scale model training.
2025-09
Internal testing of Visics prototype begins in controlled industrial environments.
2026-06
Official public launch of the Visics general-purpose embodied AI model.
📰
Weekly AI Recap
Read this week's curated digest of top AI events →
👉Related Updates

Tombot raises $7m to bring robotic dog Jennie to market
The Next Web (TNW)•Jun 25

Amazon's Zoox unveils new production-ready autonomous robotaxi
Engadget•Jun 25
Masayoshi Son Reveals Robot Automated Mass Production Factory
ITmedia AI+ (日本)•Jun 25

DARPA's X-65 experimental aircraft nears flight testing phase
cnBeta (Full RSS)•Jun 25
AI-curated news aggregator. All content rights belong to original publishers.
Original source: Pandaily ↗