💰钛媒体•Freshcollected in 16m
Is building robotic hands more profitable than building robots?
💡Discover why 'dexterous hands' are the new high-value frontier in the humanoid robotics industry.
⚡ 30-Second TL;DR
What Changed
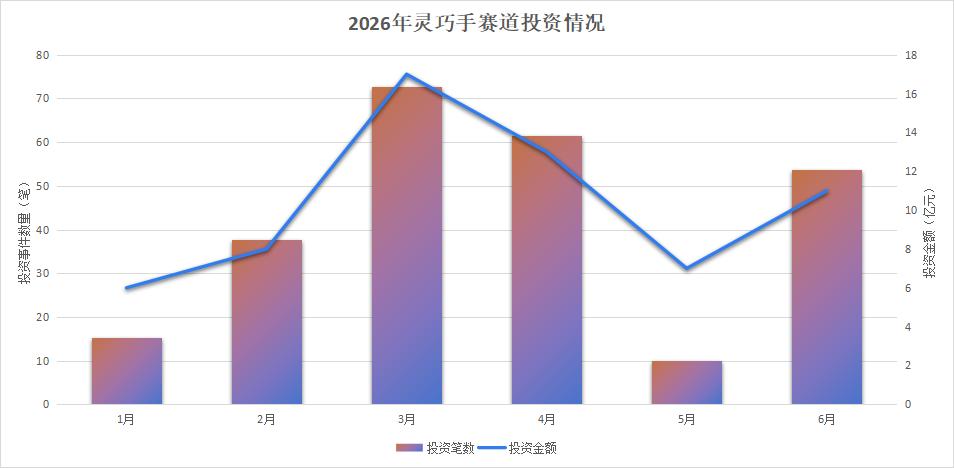
Capital is flooding into the development of robotic dexterous hands
Why It Matters
Focusing on modular, high-performance robotic components could be a more viable path for startups than competing with large-scale humanoid robot manufacturers.
What To Do Next
Research the latest tactile sensor integration techniques for robotic end-effectors to improve manipulation precision.
Who should care:Developers & AI Engineers
🧠 Deep Insight
AI-generated analysis for this event.
🔑 Enhanced Key Takeaways
- •The shift toward modular robotic hands is driven by the 'decoupling' strategy, allowing manufacturers to sell high-value end-effectors to multiple humanoid platforms rather than betting on a single full-body robot design.
- •Current dexterous hand development is heavily focused on reducing the 'bill of materials' (BOM) cost, with industry targets aiming to bring production costs below $5,000 to enable mass-market commercial adoption.
- •Integration of tactile sensing arrays using MEMS (Micro-Electro-Mechanical Systems) technology is the primary technical differentiator currently separating high-end dexterous hands from basic industrial grippers.
- •Supply chain analysis indicates that the scarcity of high-torque-density micro-motors and harmonic drives is currently the primary constraint on the scalability of dexterous hand production.
- •Standardization efforts are emerging, such as the development of universal communication protocols (e.g., EtherCAT-based interfaces) to ensure third-party hands can be integrated into diverse humanoid chassis.
📊 Competitor Analysis▸ Show
| Feature | Shadow Robot (Dexterous Hand) | Sanctuary AI (Phoenix Hand) | Tesla (Optimus Hand) |
|---|---|---|---|
| Degrees of Freedom | 20+ | 10-12 | 11 |
| Primary Focus | Research & Teleoperation | Commercial Deployment | Mass Production/Cost |
| Tactile Sensing | High-fidelity (BioTac) | Integrated Pressure Sensors | Vision-based/Proprioceptive |
| Market Strategy | Premium/Custom | Integrated System | Vertical Integration |
🛠️ Technical Deep Dive
- Actuation: Utilization of tendon-driven mechanisms to mimic human musculoskeletal structure, allowing for high force-to-weight ratios.
- Sensing: Implementation of multi-modal tactile skins capable of detecting shear force, vibration, and thermal properties.
- Control Architecture: Transition from centralized control to distributed embedded controllers located within the palm to reduce latency and wiring complexity.
- Materials: Adoption of high-strength carbon fiber composites and 3D-printed TPU (Thermoplastic Polyurethane) for flexible, durable finger joints.
🔮 Future ImplicationsAI analysis grounded in cited sources
Dexterous hand manufacturers will achieve profitability before full-body humanoid OEMs.
The component-supplier model avoids the massive R&D and safety liability costs associated with full-body autonomous robot deployment.
Tactile sensor integration will become the primary driver of M&A activity in the robotics sector by 2027.
As mechanical dexterity matures, the ability to 'feel' and manipulate objects will become the most valuable intellectual property for scaling robot utility.
⏳ Timeline
2023-05
Initial surge in venture capital interest for specialized humanoid end-effectors.
2024-02
Major humanoid OEMs begin publicly separating hand development into modular business units.
2025-09
First wave of commercial-grade dexterous hands reaches sub-$10,000 price points.
📰
Weekly AI Recap
Read this week's curated digest of top AI events →
👉Related Updates


AI-curated news aggregator. All content rights belong to original publishers.
Original source: 钛媒体 ↗