🇨🇳cnBeta (Full RSS)•Stalecollected in 65m
Yuxing-3 06 Aces Space Arm In-Orbit Test
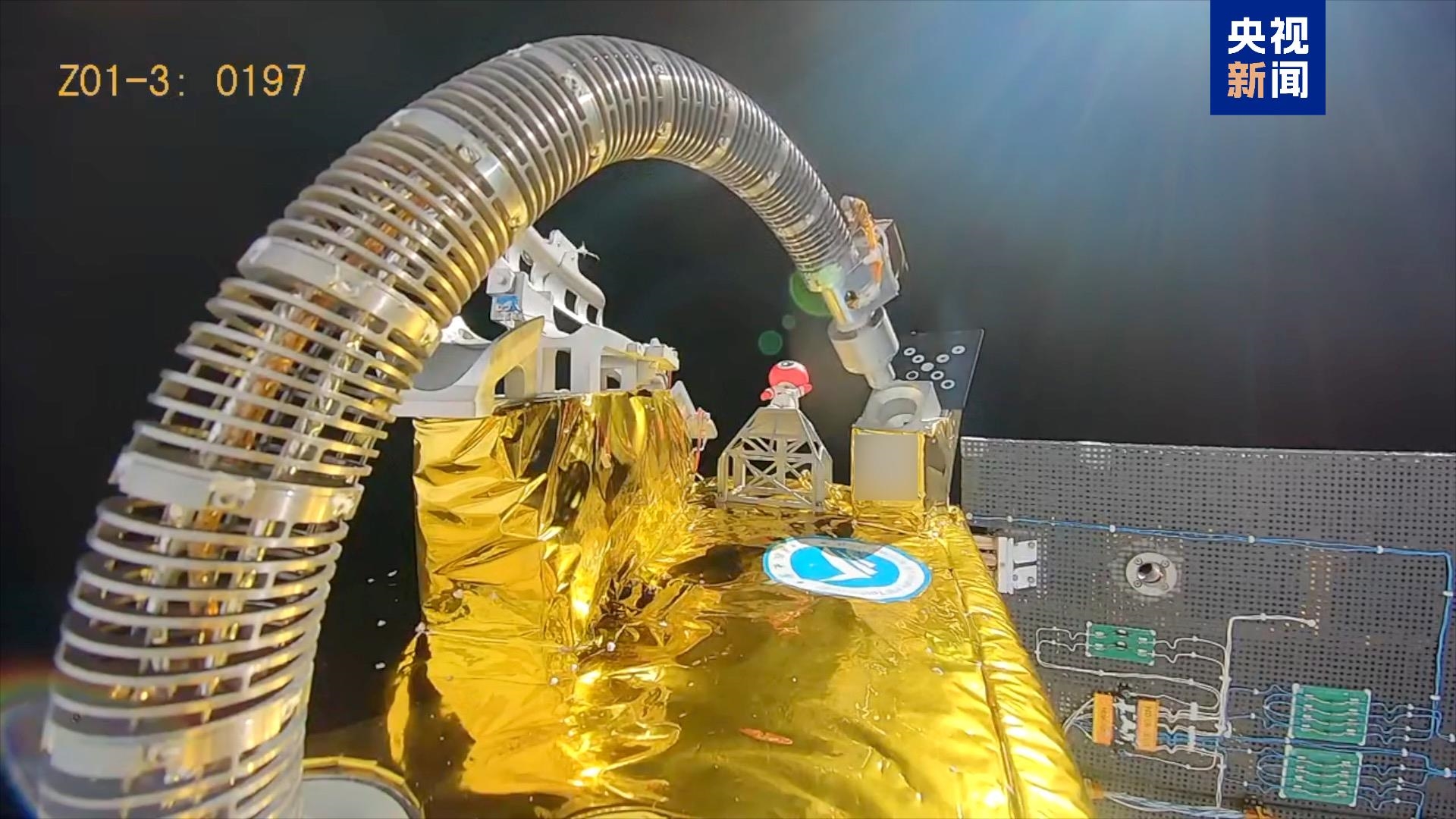
💡Space robotics milestone: flexible arm nails fuel sim, inspires embodied AI manipulators
⚡ 30-Second TL;DR
What Changed
First commercial satellite featuring flexible mechanical arm
Why It Matters
Advances orbital robotics for sustainable space ops, potentially integrating AI for autonomous refueling and maintenance, benefiting long-term satellite fleets.
What To Do Next
Study Yuxing-3 06 arm control demos on cnBeta for soft robotics algorithm ideas.
Who should care:Researchers & Academics
Key Points
- •First commercial satellite featuring flexible mechanical arm
- •Successfully verified simulated fuel refueling in orbit
- •Demonstrated compliant control operations for precise tasks
- •Enables applications in space servicing and debris removal
🧠 Deep Insight
AI-generated analysis for this event.
🔑 Enhanced Key Takeaways
- •The Yuxing-3 06 satellite was developed by the Chinese commercial space company Origin Space, marking a significant milestone in their 'NEO-01' and subsequent robotic servicing technology roadmap.
- •The flexible robotic arm utilizes advanced force-feedback control algorithms, allowing it to handle delicate interactions with non-cooperative targets, which is critical for future space debris mitigation missions.
- •The mission successfully demonstrated the 'capture-and-transfer' capability, a foundational technology required for the commercialization of in-orbit satellite life-extension services.
📊 Competitor Analysis▸ Show
| Feature | Yuxing-3 06 (Origin Space) | MEV-1 (Northrop Grumman) | Astroscale ELSA-d |
|---|---|---|---|
| Primary Focus | Commercial Flexible Arm | Life Extension (Docking) | Debris Removal (Capture) |
| Mechanism | Flexible Robotic Arm | Docking Adapter | Magnetic Capture |
| Status | In-Orbit Test Verified | Operational | Mission Completed |
🛠️ Technical Deep Dive
- Arm Architecture: Employs a multi-degree-of-freedom (DOF) flexible manipulator designed for high-precision, low-impact contact with target interfaces.
- Control System: Implements compliant control logic that adjusts arm stiffness in real-time based on sensor feedback to prevent damage during docking or refueling simulations.
- Payload Integration: Features a modular interface allowing the arm to switch between refueling nozzle simulation tools and debris capture end-effectors.
- Sensory Suite: Utilizes a combination of visual-servoing cameras and force/torque sensors at the end-effector to achieve sub-centimeter positioning accuracy.
🔮 Future ImplicationsAI analysis grounded in cited sources
Commercial in-orbit refueling services will become a viable revenue stream by 2028.
Successful verification of refueling simulation protocols reduces the technical risk for private operators to offer life-extension services to aging geostationary satellites.
China will increase the deployment of robotic-arm-equipped satellites for active debris removal (ADR) missions.
The validation of compliant control for delicate capture tasks provides the necessary technical foundation for cleaning up crowded low-Earth orbits.
⏳ Timeline
2023-12
Origin Space announces the development of the Yuxing-3 series for in-orbit servicing.
2025-08
Yuxing-3 06 successfully launched into orbit.
2026-02
Initial deployment and calibration of the flexible robotic arm payload.
2026-03
Completion of in-orbit refueling and compliant control verification tests.
📰
Weekly AI Recap
Read this week's curated digest of top AI events →
👉Related Updates
AI-curated news aggregator. All content rights belong to original publishers.
Original source: cnBeta (Full RSS) ↗