🗾ITmedia AI+ (日本)•Stalecollected in 58m
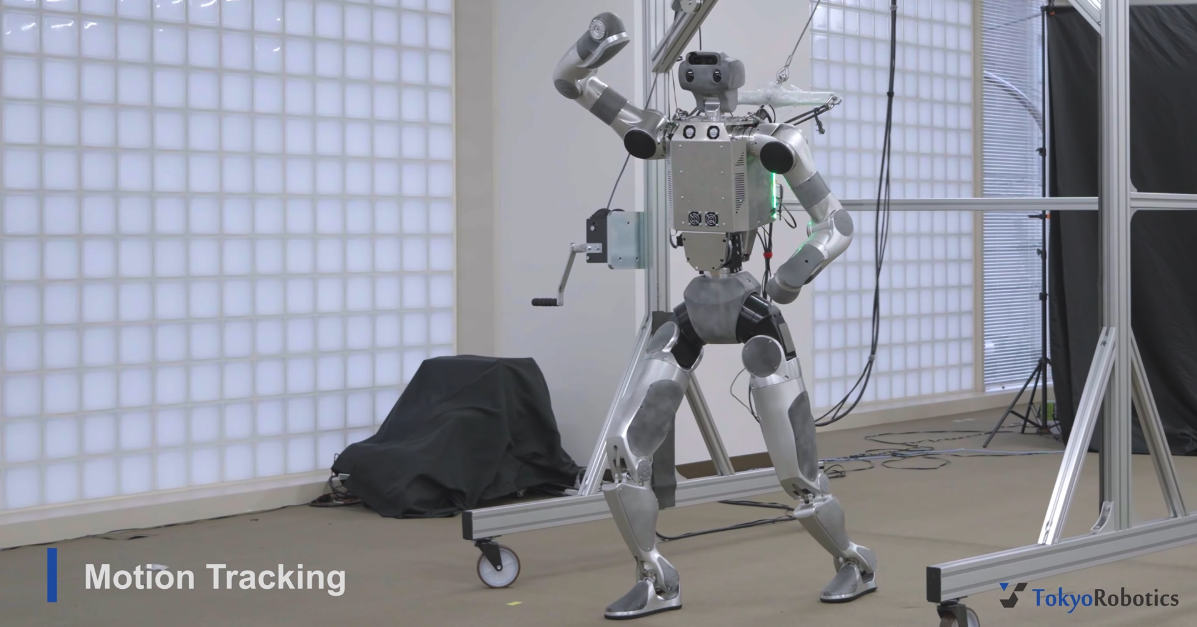
Japanese Startup Demos Dancing Humanoid Robot
💡Japan's humanoid robot masters bipedal walk & dance—insights for embodied AI devs.
⚡ 30-Second TL;DR
What Changed
Tokyo Robotics (Waseda spin-off) unveiled Torobo Humanoid prototype demo video.
Why It Matters
Advances Japan's embodied AI capabilities, potentially challenging global leaders like Boston Dynamics. Signals growing investment in humanoid robotics for real-world applications.
What To Do Next
Watch Tokyo Robotics' demo video to analyze bipedal control techniques for your embodied AI projects.
Who should care:Researchers & Academics
Key Points
- •Tokyo Robotics (Waseda spin-off) unveiled Torobo Humanoid prototype demo video.
- •Robot demonstrates stable bipedal walking.
- •Performs dance and complex full-body motions via remote operation.
- •Developed as Japan's domestic humanoid robot.
🧠 Deep Insight
AI-generated analysis for this event.
🔑 Enhanced Key Takeaways
- •The Torobo Humanoid utilizes a proprietary 'Torobo-Actuator' system, which integrates high-torque density motors with advanced force-sensing capabilities to achieve human-like compliance.
- •The robot's control architecture leverages a hybrid approach combining traditional model-based control for stability with a neural-network-based motion generator for fluid, expressive movements.
- •Tokyo Robotics is positioning the platform as a research-grade development kit, aiming to lower the barrier for Japanese universities and SMEs to conduct advanced robotics research.
📊 Competitor Analysis▸ Show
| Feature | Tokyo Robotics (Torobo) | Figure AI (Figure 02) | Tesla (Optimus Gen 2) |
|---|---|---|---|
| Primary Focus | Research/Academic | Commercial/Industrial | Mass Production/Consumer |
| Control Mode | Remote/Teleop-focused | Autonomous/AI-driven | Autonomous/AI-driven |
| Actuation | Proprietary High-Torque | Electro-mechanical | Electro-mechanical |
| Market Stage | Prototype/Research | Commercial Pilot | Prototype/Factory Testing |
🛠️ Technical Deep Dive
- •Actuation: Employs custom-designed brushless DC motors with integrated harmonic drive gearboxes for high torque-to-weight ratios.
- •Sensing: Features multi-axis force/torque sensors at the ankles and wrists to enable reactive balance and delicate object manipulation.
- •Control System: Utilizes a real-time Linux-based OS with a custom middleware layer optimized for low-latency teleoperation feedback loops.
- •Degrees of Freedom (DoF): The prototype features 28 active DoF, allowing for complex full-body kinematics.
🔮 Future ImplicationsAI analysis grounded in cited sources
Tokyo Robotics will transition from research-only to industrial pilot programs by Q4 2027.
The focus on a modular, research-grade platform suggests a strategy to build a developer ecosystem before scaling to commercial applications.
The Torobo architecture will integrate large-scale foundation models for autonomous navigation within 18 months.
The current reliance on teleoperation is a known bottleneck that the company is actively addressing through partnerships with AI software firms.
⏳ Timeline
2015-04
Tokyo Robotics established as a spin-off from Waseda University's robotics laboratory.
2019-11
Launch of the 'Torobo' series of modular robotic actuators for research applications.
2024-06
Secured Series B funding to accelerate development of full-body humanoid platforms.
2026-04
Public unveiling of the Torobo Humanoid prototype demo video.
📰
Weekly AI Recap
Read this week's curated digest of top AI events →
👉Related Updates

AI-curated news aggregator. All content rights belong to original publishers.
Original source: ITmedia AI+ (日本) ↗